PMB-2 Mapping tutorial ROS2
Purpose
This tutorial shows how to make PMB-2 navigate and create a map using the navigation from ros2. You can find further information about that in the nav2_SLAM tutorial.
Pre-Requisites
First make sure that the tutorials are properly installed along with the PMB-2 simulation, as shown in the tutorials installation section.
Execution
First of all open two consoles and source ros setup
source /opt/ros/foxy/setup.bash
In the first console launch the following simulation
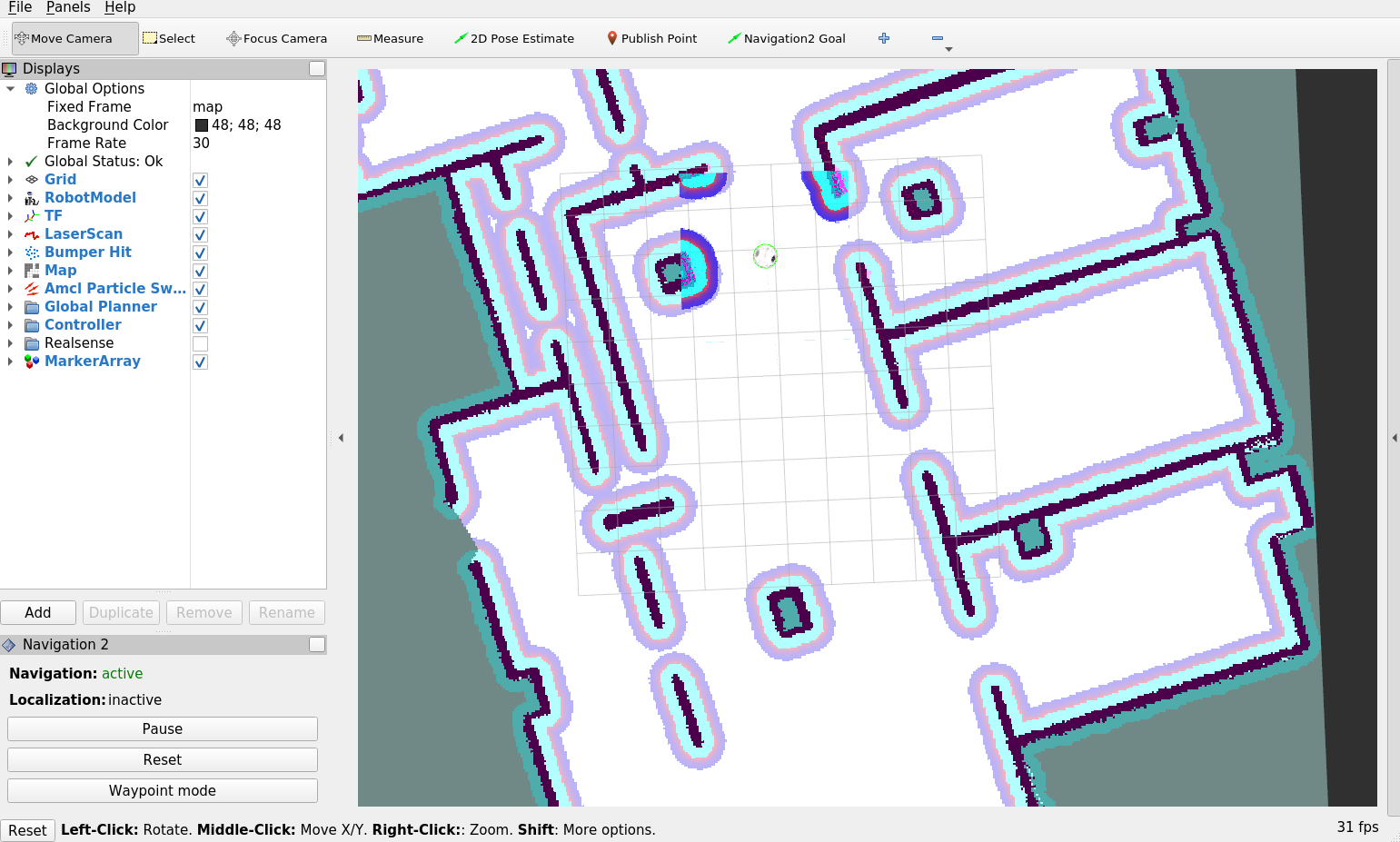
ros2 launch pmb2_2dnav_gazebo pmb2_mapping_gazebo.launch.py

Note that a rviz will also show up in order to visualize the mapping process.
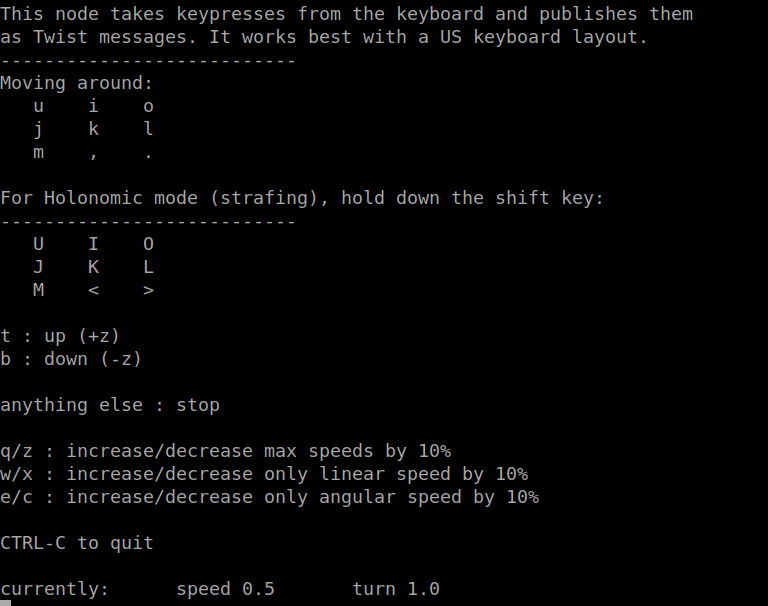
In the second console launch the keyboard teleoperation node
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=key_vel
You can use the keyboard to navigate the robot and create the map.
As shown in the nav2_SLAM tutorial you can save the map by doing: